STM32学习笔记4——GPIO
本文最后更新于:2024年11月4日 晚上
0x00 Reference
0x01 GPIO简介
GPIO(General Purpose Input Output),即通用输入输出端口,负责采集外部器件的信息或者控制外部器件工作,即输入输出
1-1 GPIO特点
不同型号,IO口数量可能不一样,可通过选型手册快速查询
快速翻转,每次翻转最快只需要两个时钟周期(F1最高速度可以到50Mhz)
每个IO口都可以做中断
支持8种工作模式
1-2 GPIO电气特性
STM32工作电压范围?
2V ~ 3.6V
GPIO识别电压范围?
COMS端口:-0.3V ≤ V(IL) ≤ 1.164V ,1.833V ≤ V(IH) ≤ 3.6V
TLL端口(FT标记):兼容5V
GPIO输出电流?
单个IO,最大25mA
1-3 GPIO引脚分布类型
电源引脚
晶振引脚
复位引脚
下载引脚
BOOT引脚
GPIO引脚
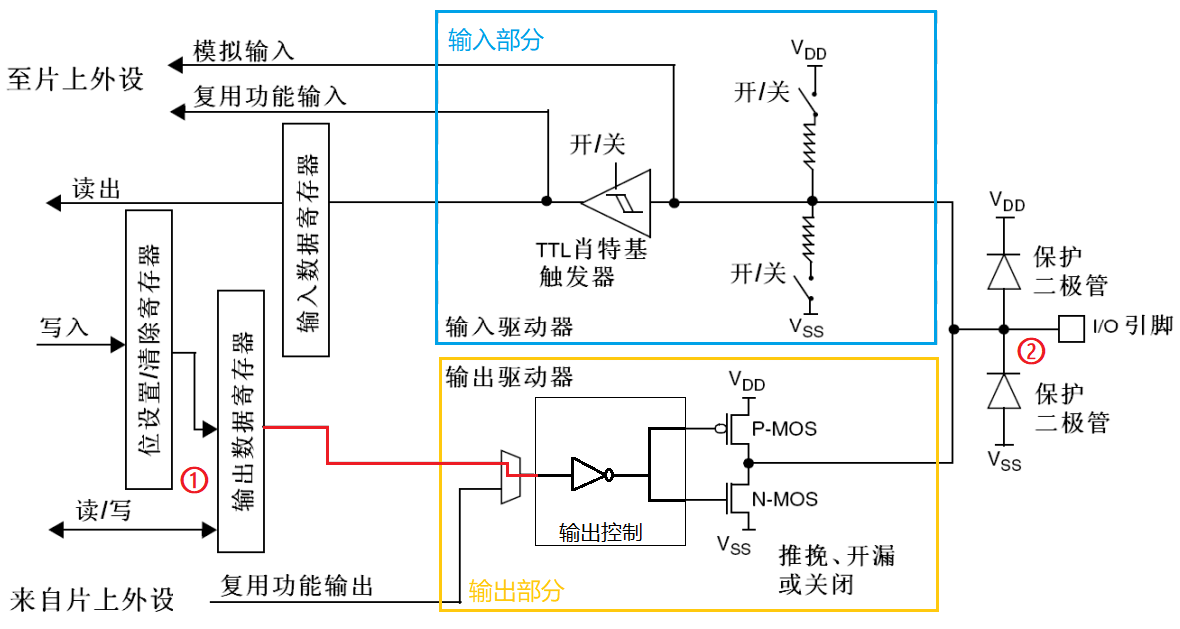
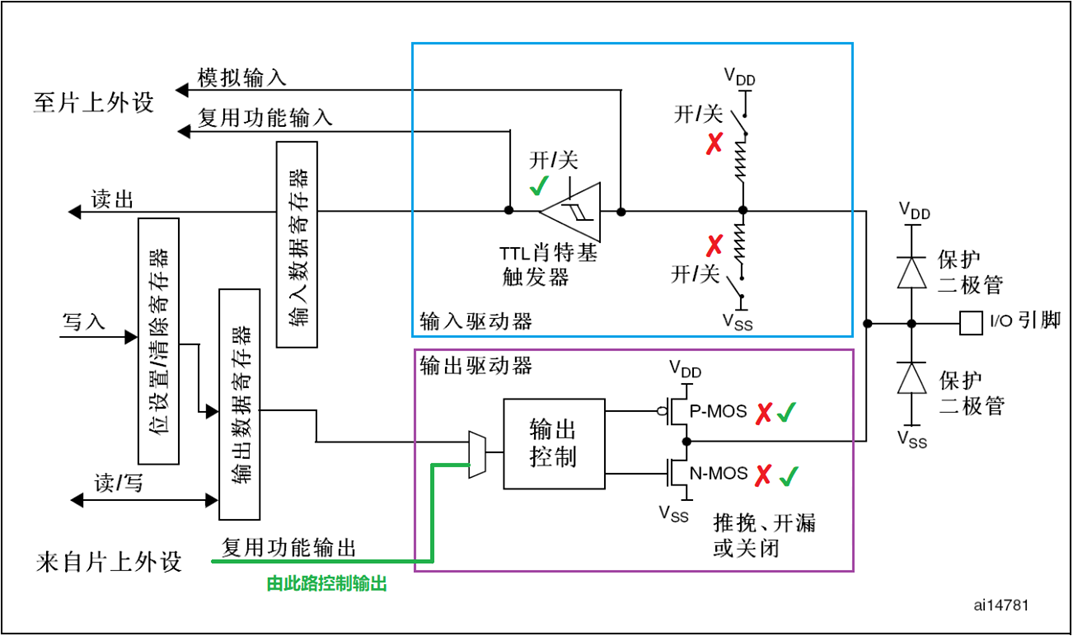
0x02 IO端口基本结构介绍
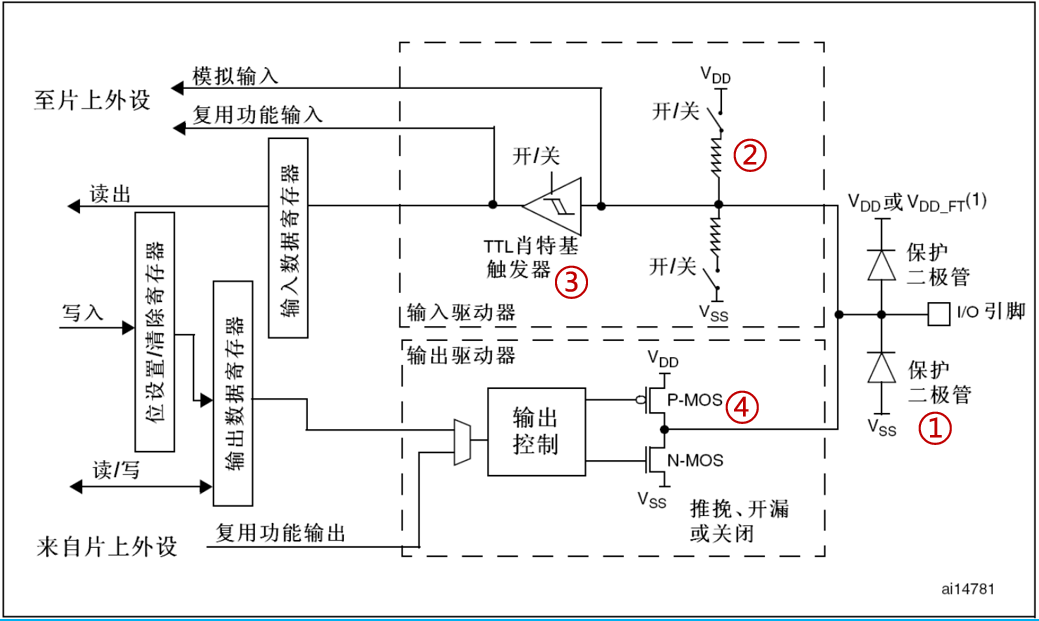
① 保护二极管
保证了引脚只有在Vss到Vdd之间的电压信号才能传入IO端口内部
② 内部上拉、下拉电阻(30k~50k欧 )
用来设置IO口默认电平
③ 施密特触发器
用来整形输入电路
④ P-MOS & N-MOS管
用来控制输出电平
2-1 施密特触发器简介
施密特触发器就是一种整形电路,可以将非标准方波,整形成方波

特点:
当输入电压高于正向阈值电压,输出为高;
当输入电压低于负向阈值电压,输出为低;
当输入在正负向阈值电压之间,输出不改变。
作用:整形!如正弦波转方波
2-2 P-MOS & N-MOS管简介
MOS管是压控型元件,通过控制栅源电压( Vgs )来实现导通或关闭。

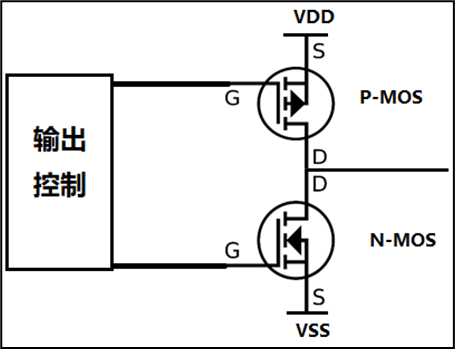
G:栅极
S:源极
D:漏极
P-MOS:Vgs<0,导通
N-MOS:Vgs>0,导通
0x03 GPIO的八种模式
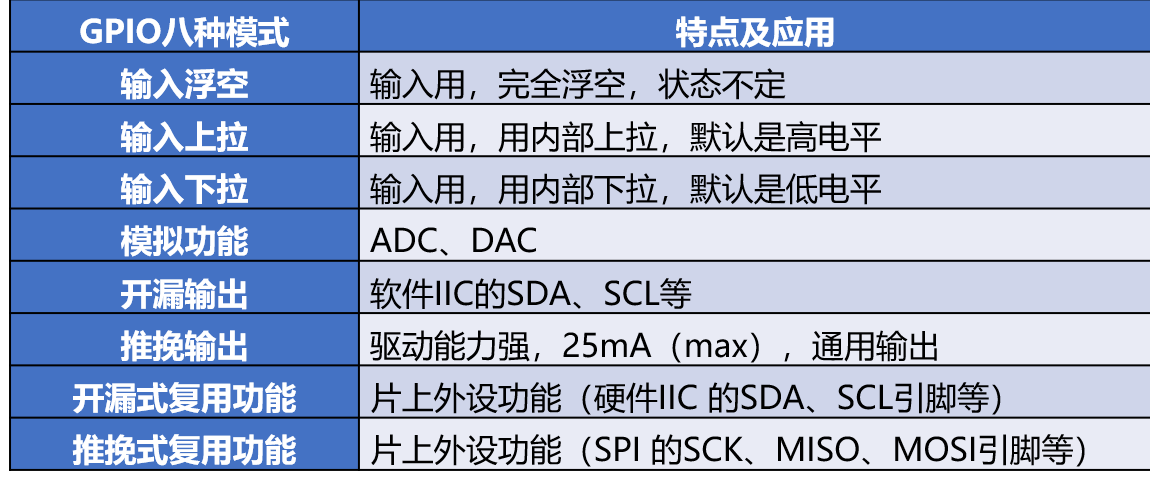
3-1 输入浮空

①上拉电阻关闭
②下拉电阻关闭
③施密特触发器打开
④双MOS管不导通
特点:空闲时,IO状态不确定,由外部环境决定,可以用于按键检测等场景
3-2 输入上拉
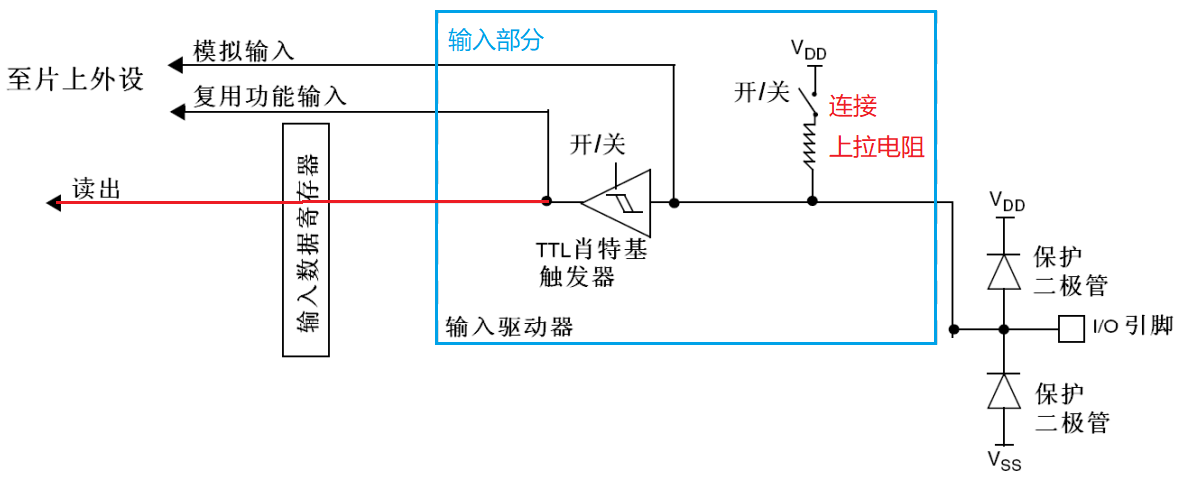
①上拉电阻打开
②下拉电阻关闭
③施密特触发器打开
④双MOS管不导通
特点:空闲时,IO呈现高电平;由于内部上拉电阻阻值大,电流小,不适合做驱动
3-3 输入下拉

①上拉电阻关闭
②下拉电阻打开
③施密特触发器打开
④双MOS管不导通
特点:空闲时,IO呈现低电平,同输入上拉一样,不适合做电流型驱动
3-4 模拟功能
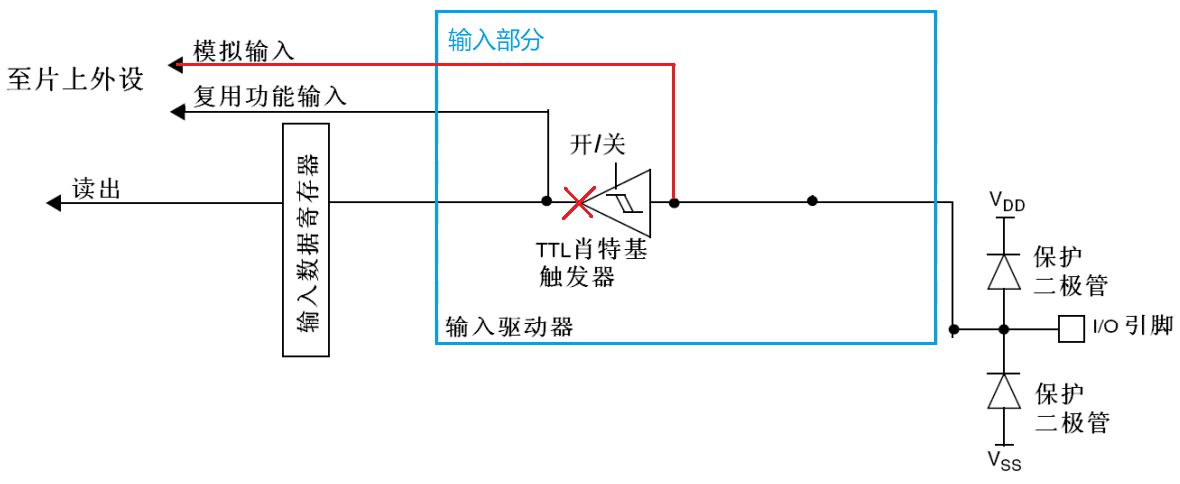
①上拉电阻关闭
②下拉电阻关闭
③施密特触发器关闭
④双MOS管不导通
特点:专门用于模拟信号输入或输出,如:ADC和DAC
3-5 开漏输出
①上拉电阻关闭
②下拉电阻关闭
③施密特触发器打开
④P-MOS管始终不导通
⑤往ODR对应位写0,N-MOS管导通,写1则N-MOS管不导通的
特点:
- 内部只能输出低电平Vss和高阻态,输出高电平需要外部上拉电阻
- 施密特触发器打开,可以读取IO口的电平状态
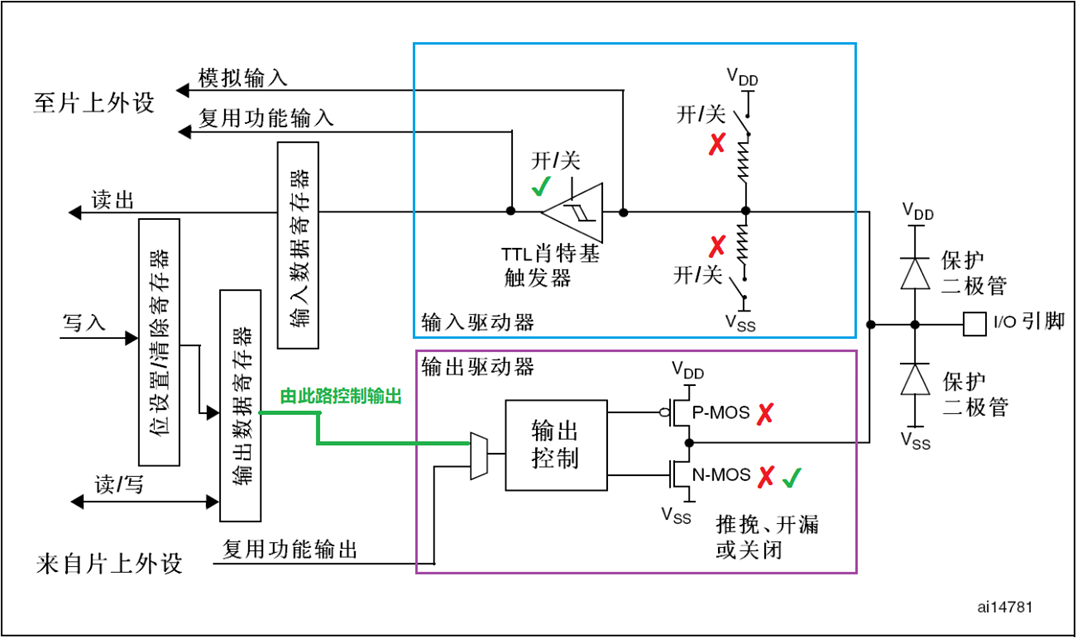
3-6 开漏式复用功能
①上拉电阻关闭
②下拉电阻关闭
③施密特触发器打开
④ P-MOS管始终不导通
**特点: **
不能输出高电平, 必须有外部(或内部),上拉才能输出高电平
由其他外设控制输出
3-7 推挽输出
①上拉电阻关闭
②下拉电阻关闭
③施密特触发器打开
④往ODR对应位写0,N-MOS管导通,写1则P-MOS管导通
特点:
- 可输出高低电平,驱动能力强
- P-MOS和N-MOS只能同时有一个导通
- 施密特触发器打开,可以读取IO输入电平
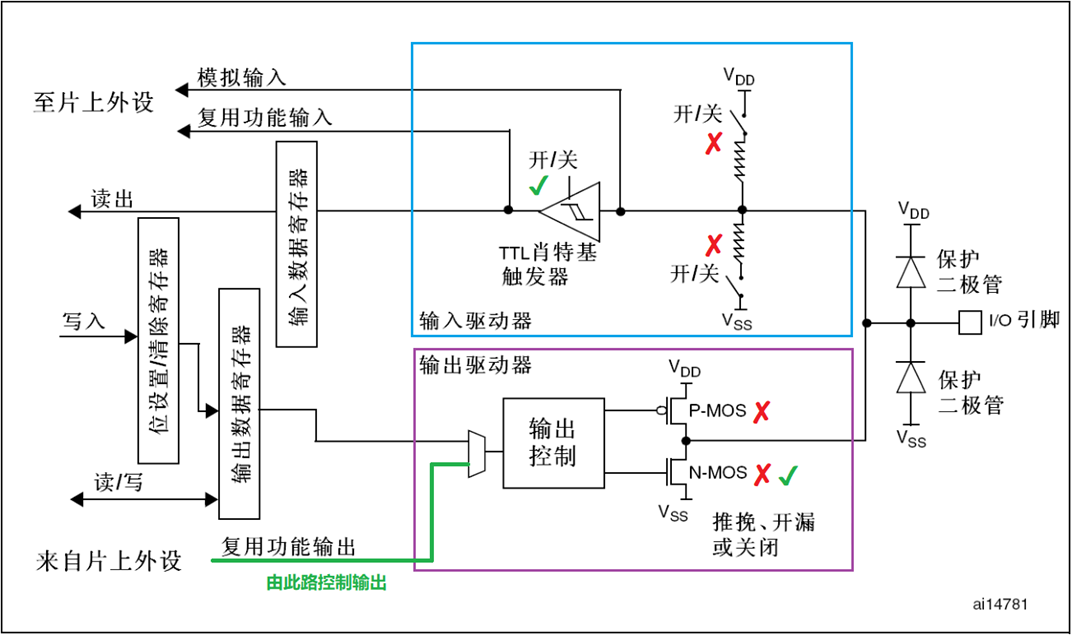
3-8 推挽式复用功能
①上拉电阻关闭
②下拉电阻关闭
③施密特触发器打开
特点:
**可输出高低电平,驱动能力强 **
由其他外设控制输出
0x04 GPIO寄存器介绍
STM32F1 每组 通用 GPIO 口有 7 个 32 位寄存器控制,包括 :
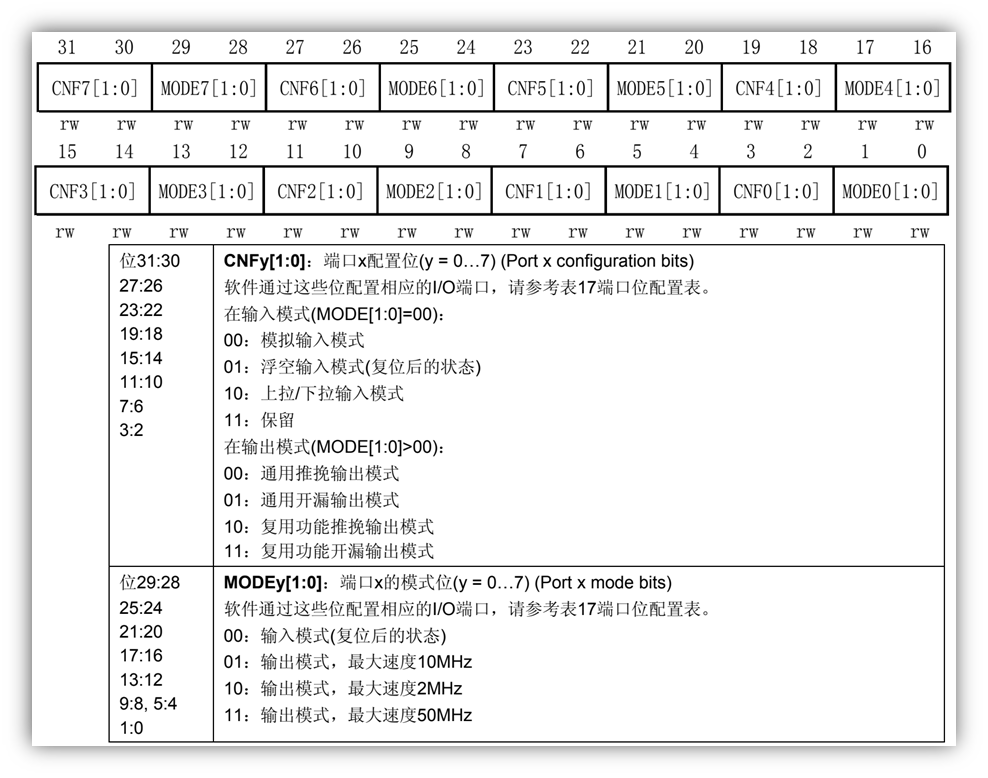
2 个 32 位端口配置寄存器(CRL 和 CRH)
2 个 32 位端口数据寄存器(IDR 和 ODR)
1 个 32 位端口置位/复位寄存器(BSRR)
1 个 16 位端口复位寄存器(BRR)
1 个 32 位端口锁定寄存器 (LCKR)
4-1 端口配置低寄存器(GPIOx_CRL)
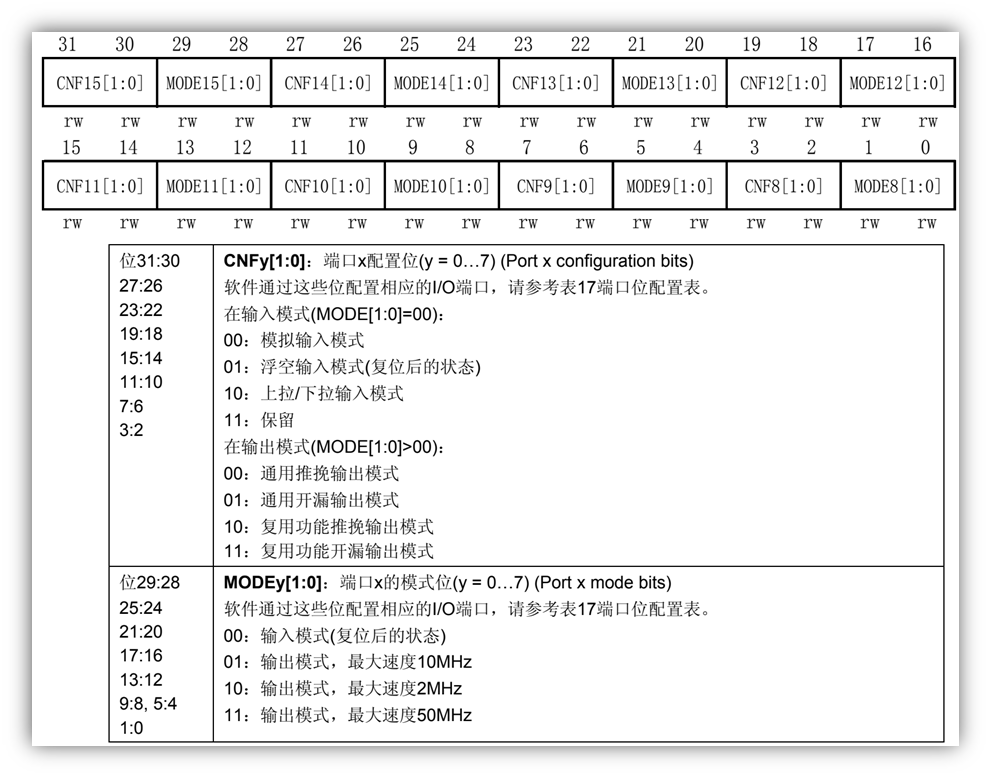
4-2 端口配置高寄存器(GPIOx_CRH)
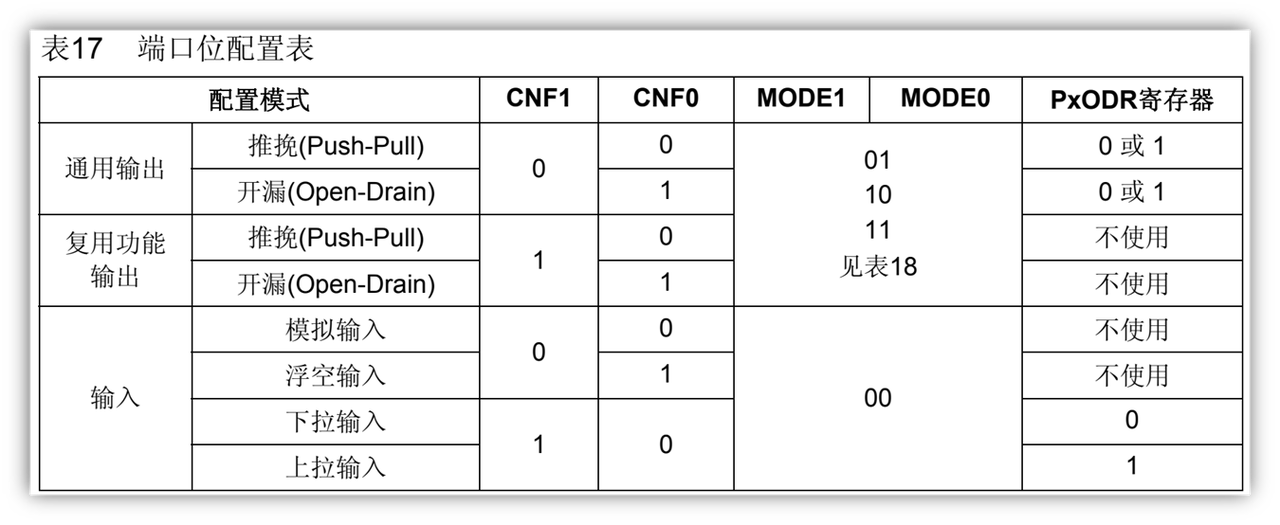
4-3 工作模式配置补充
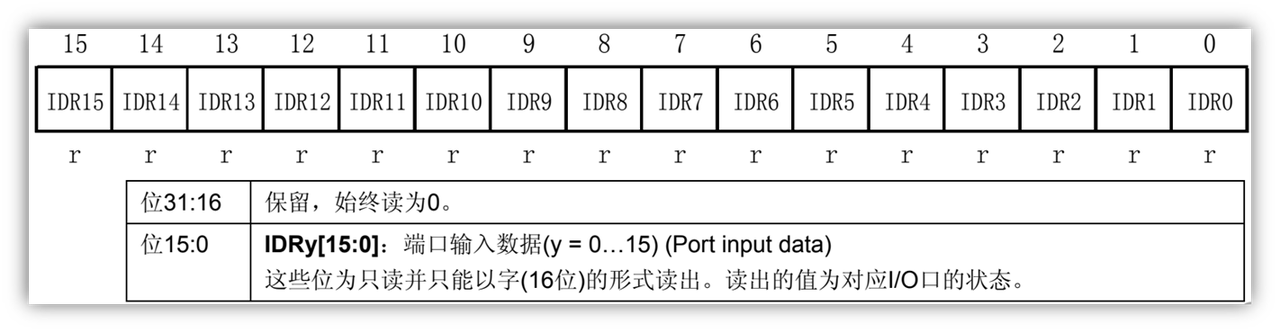
4-4 端口输入数据寄存器(GPIOx_IDR)
用于读取IO引脚输入的电平
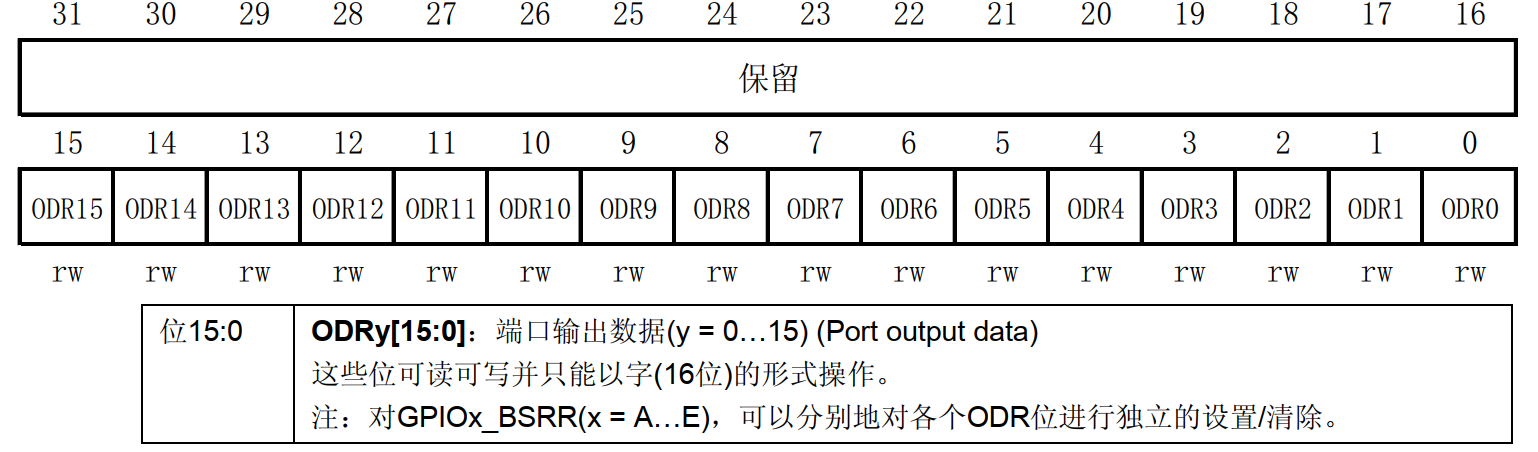
4-5 端口输出数据寄存器(GPIOx_ODR)
该寄存器用于控制 GPIOx 的输出高电平或者低电平
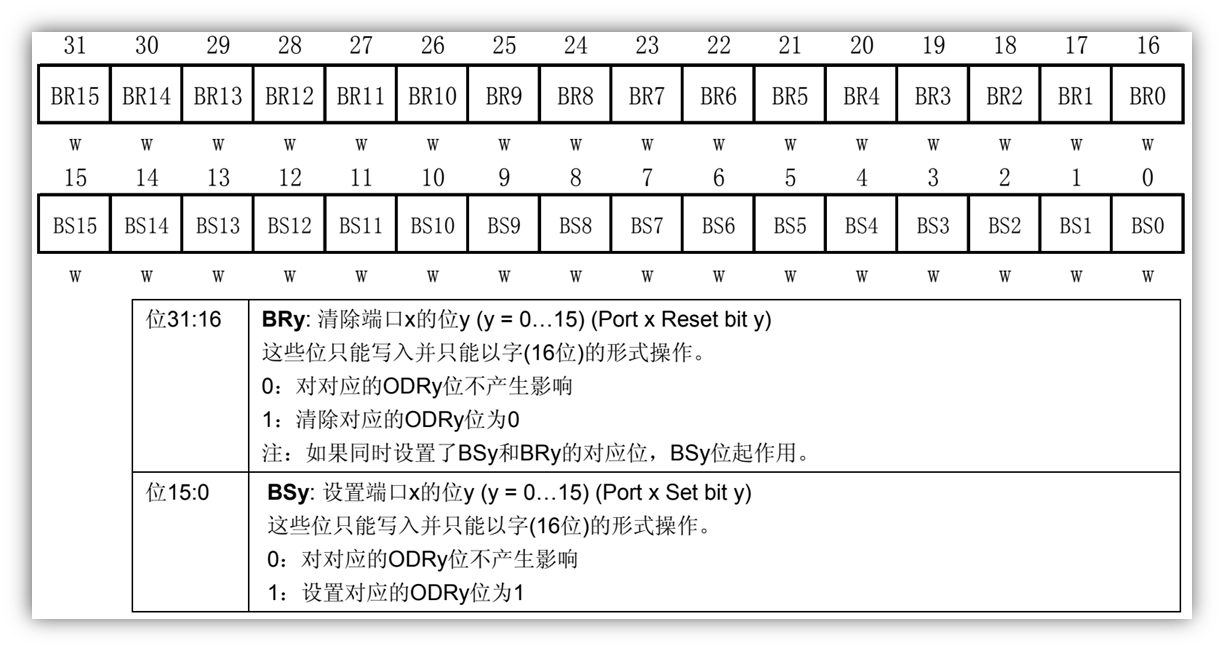
4-6 端口位设置/清除寄存器(GPIOx_BSRR)
用于设置ODR寄存器
4-6 ODR和BSRR寄存器控制输出有什么区别?
首先 BSRR 是只写权限,而 ODR 是可读可写权限。BSRR 寄存器 32 位有效,对于低 16 位,我们往相应的位写 1,那么对应的 IO 口会输出高电平,往相应的位写 0,对 IO 口没有任何影响,高16位作用刚好相反,对相应的位写 1会输出低电平,写 0没有任何影响。
也就是说,对于BSRR寄存器,你写 0 的话,对 IO 口电平是没有任何影响的。我们要设置某个 IO 口电平,只需要相关位设置为 1 即可。而 ODR 寄存器,我们要设置某个 IO 口电平,我们首先需要读出来 ODR 寄存器的值,然后对整个 ODR 寄存器重新赋值来达到设置某个或者某些 IO 口的目的,而 BSRR 寄存器直接设置即可,这在多任务实时操作系统中作用很大。BSRR寄存器还有一个好处,就是 BSRR 寄存器改变引脚状态的时候,不会被中断打断,而 ODR 寄存器有被中断打断的风险。
总的来说,建议使用BSRR寄存器控制输出!
0x05 通用外设驱动模型(四步法)

0x06 GPIO配置步骤
6-1 配置步骤
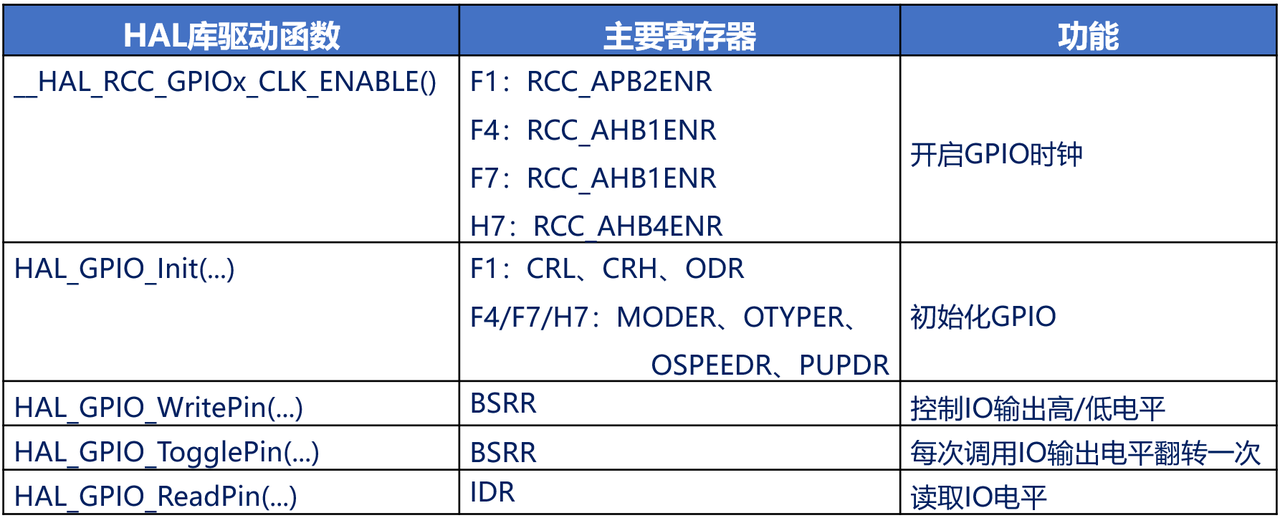
使能时钟 __HAL_RCC_GPIOx_CLK_ENABLE()
设置工作模式 HAL_GPIO_Init()
设置输出状态(可选) HAL_GPIO_WritePin()、HAL_GPIO_TogglePin()
读取输入状态(可选) HAL_GPIO_ReadPin()
6-2 相关HAL库函数简介
HAL 库中关于 GPIO 的驱动程序在 stm32f1xx_hal_gpio.c 文件以及其对应的头文件。
6.2.1 HAL_GPIO_Init
初始化GPIO口
1 | |
第一个入口参数是GPIOx,实际上就是对应的GPIO寄存器组的基地址
1
2
3
4
5#define GPIOA ((GPIO_TypeDef *)GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *)GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *)GPIOC_BASE)
#define GPIOD ((GPIO_TypeDef *)GPIOD_BASE)
#define GPIOE ((GPIO_TypeDef *)GPIOE_BASE)第二个入口参数是一个结构体指针,其描述了GPIO组下的各引脚的功能
1
2
3
4
5
6
7
8//define in stm32f1xx_hal_gpio.h
typedef struct
{
uint32_t Pin; /* 引脚号 */
uint32_t Mode; /* 模式设置 */
uint32_t Pull; /* 上拉下拉设置 */
uint32_t Speed; /* 速度设置 */
} GPIO_InitTypeDef;
由CubeMX自动生成的配置GPIO的代码示例如下
1 | |
6.2.2 HAL_GPIO_WritePin
控制GPIO口输出电平
1 | |
第一个入口参数同样是GPIOx,就是对应的GPIO寄存器组的基地址,同上
第二个入口参数是GPIO_Pin,是该GPIO组中具体的Pin,可选GPIO_PIN_0到GPIO_PIN_15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18//define in stm32f1xx_hal_gpio.h
#define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
#define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
#define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
#define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
#define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
#define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
#define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
#define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
#define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
#define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
#define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
#define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
#define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
#define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
#define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
#define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
#define GPIO_PIN_All ((uint16_t)0xFFFF) /* All pins selected */第三个入口参数PinState是要输出的电平状态,0为低电平,1为高电平
1
2
3
4
5
6//define in stm32f1xx_hal_gpio.h
typedef enum
{
GPIO_PIN_RESET = 0u,
GPIO_PIN_SET
} GPIO_PinState;
6.2.3 HAL_GPIO_ReadPin
从GPIO中读取IO口电平状态
1 | |
- 第一个入口参数同样是GPIOx,就是对应的GPIO寄存器组的基地址,同上
- 第二个入口参数是GPIO_Pin,是该GPIO组中具体的Pin,同上
- 返回值是枚举类型GPIO_PinState,代表IO口的电平状态,0为低电平,1为高电平,同上
6.2.4 HAL_GPIO_TogglePin
用于设置引脚的电平翻转,调用此函数后,对应的GPIO引脚电平会发生翻转
1 | |
- 第一个入口参数同样是GPIOx,同上
- 第二个入口参数是GPIO_Pin,是GPIO组中具体的引脚号,同上